Laser Scanner 2D serie RF627

Gli scanner laser sono destinati alla misurazione e al controllo senza contatto del profilo della superficie, dimensioni, smistamento e rilevamento di oggetti tecnologici, costruzione di modelli 3D.
La serie comprende:
RF627 - scanner universali ad alta velocità;
RF627Smart - scanner con funzioni di misurazione integrate;
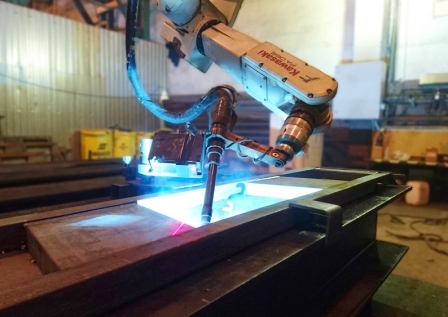
RF627Weld - scanner per robot di saldatura;
RF627Weld-Smart - scanner per robot di saldatura con software di tracciamento integrato (da Novembre 2021);
RF627AVIKScan - sistema di ispezione del cordone di saldatura;
RF629 - scanner ultrarapidi, fino a 50000 profili / s (da Novembre 2021).
RF627, RF627Smart
19 modelli di:
■ scanner compatti, ad alta precisione e ad alta velocità
■ disponibile nelle lunghezze d'onda del diodo rosso , blu e IR
Campi di misura, mm: da 10 a 1165
Linearità,% di FS: ± 0,05
Velocità di misurazione, profilo / i: 484.938.5096.6800
Interfaccia: Ethernet / 1000 Mbps
Ingressi di sincronizzazione: RS422, 3 canali
Uscite: RS422, 1 canale
Shock: 30 g / 6 ms
Grado di protezione: IP67
Alimentazione elettrica:
9 ... 30 V o 12 ... 36 V
per scanner con laser blu
RF627Smart
In RF627Smart l'analisi, i calcoli, le misurazioni, il controllo delle tolleranze vengono eseguiti secondo l'algoritmo creato dall'utente. I risultati delle misurazioni possono essere trasmessi tramite vari protocolli (Ethernet / IP, Modbus TCP, UDP), nonché alle uscite logiche dello scanner per controllare gli attuatori e notificare l'idoneità del prodotto.
Vedere le specifiche dettagliate :
| Gamma | MR, mm | SMR, mm | EMR, mm | Хsmr, mm | Xemr, mm | Laser | Dimensioni, mm | Peso (kg | |
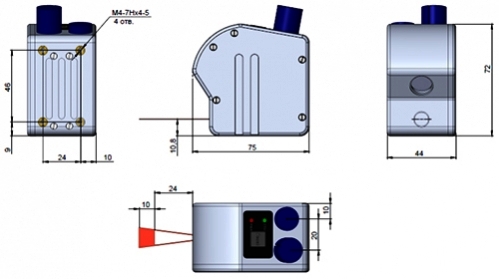
| 25 / 10-8 / 11 | 10 | 25 | 35 | 8 | 11 |
660 nm o 405 nm o 808 nm Classe 2M |
72 × 71 × 44 | Fig. 1 | 0,37 |
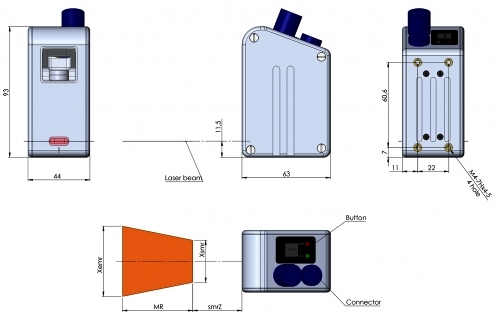
| 65 / 25-20 / 22 | 25 | 65 | 90 | 20 | 22 | 93 × 63 × 44 | Fig. 2 | 0,6 | |
| 75 / 50-30 / 41 | 50 | 75 | 125 | 30 | 41 | ||||
| 70 / 100-48 / 82 | 100 | 70 | 170 | 48 | 82 | ||||
| 70 / 150-58 / 122 | 150 | 70 | 220 | 58 | 122 | ||||
| 95 / 150-53 / 106 | 150 | 95 | 245 | 53 | 106 | ||||
| 82 / 200-60 / 150 | 200 | 82 | 282 | 60 | 150 | ||||
| 90 / 250-65 / 180 | 250 | 90 | 340 | 65 | 180 | ||||
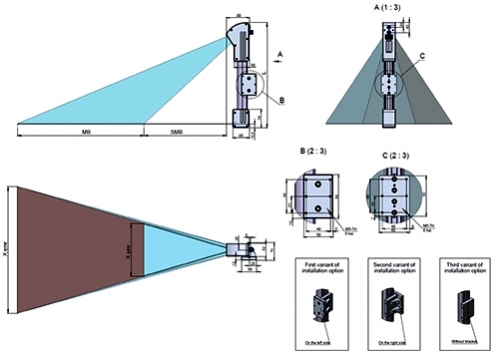
| 180 / 250-170 / 278 | 250 | 180 | 430 | 170 | 278 | L = 326 | Fig. 3 | 2 | |
| 190 / 300-160 / 300 | 300 | 190 | 490 | 160 | 300 | L = 283 | 1.9 | ||
| 220 / 300-203 / 330 | 300 | 220 | 520 | 203 | 330 | L = 374 | 2.1 | ||
| 260 / 400-210 / 400 | 400 | 260 | 660 | 210 | 400 | L = 350 | 2.2 | ||
| 325 / 500-268 / 500 | 500 | 325 | 825 | 268 | 500 | L = 415 | 2.3 | ||
| 400 / 600-320 / 600 | 600 | 400 | 1000 | 320 | 600 | L = 490 | 2.4 | ||
| 475 / 700-374 / 700 | 700 | 475 | 1175 | 374 | 700 | L = 558 | 2.5 | ||
| 545 / 800-425 / 800 | 800 | 545 | 1345 | 425 | 800 | L = 627 | 2.6 | ||
| 615 / 900-480 / 900 | 900 | 615 | 1515 | 480 | 900 | L = 696 | 2.7 | ||
| 690 / 1000-535 / 1000 | 1000 | 690 | 1690 | 535 | 1000 | L = 765 | 2.8 | ||
| 620 / 1165-430 / 1010 | 1165 | 620 | 1785 | 430 | 1010 | L = 554 | 2.5 | ||
| Velocità e precisione di campionamento | |
|
Frequenza di campionamento nominale (gamma di lavoro completa) |
484 profili / i (modalità standard), 938 profili / i (modalità DS) |
|
Frequenza di campionamento massima (modalità ROI) |
5096 profili / i, 6800 profili / i (modalità DS) |
| Linearità (errore di misura), asse Z. |
± 0,05% della portata (modalità standard), ± 0,1% della portata (modalità DS) |
| Linearità (errore di misura), asse X. | ± 0,2% dell'intervallo |
| Risoluzione, asse Z. |
0,01% della portata (modalità standard), 0,02% della portata (modalità DS) |
| Risoluzione, asse X. | 648 o 1296 punti (valore programmabile) |
| Laser | |
|
660 nm o 405 nm o 450 nm o 808 nm Classe 2M secondo IEC / EN 60825-1: 2014 |
|
| Interfaccia | |
| Di base | Ethernet / 1000 Mbps |
| Ingressi di sincronizzazione | RS422, 3 canali |
| Ingresso hardware laser on / off | 1 |
| Uscite | RS422, 1 canale |
| Alimentazione elettrica | 9 ... 30 V. |
| Consumo di energia, non di più | 6 W (senza riscaldatore integrato) |
| Resistenza all'ambiente | |
| Valutazione della custodia | IP67 |
| Vibrazione | 20 g / 10 ... 1000 Hz, 6 ore per ciascuno degli assi XYZ |
| Shock | 30 g / 6 ms |
| Temperatura ambiente di funzionamento, ° С |
-20 ... + 40, o -40 ... + 40 per scanner con riscaldatore integrato, o -40 ... + 120 per scanner con riscaldatore e sistema di raffreddamento integrati |
| Umidità relativa | 5-95% (senza condensa) |
| Temperatura di conservazione, ° С | -20 ... + 70 |
| Materiale alloggiamento / finestre | alluminio / vetro |
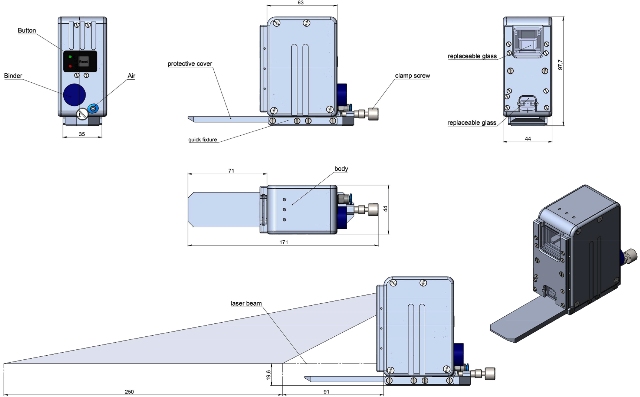
RF627Weld
7 modelli di scanner per robot di saldatura con:
■ sistemi di raffreddamento ad aria (acqua)
■ lama d'aria di Windows
■ finestre modificabili
■ dispositivo di installazione rapida
■ paraspruzzi
Campi di misura, mm:........................25.130.250
Linearità,% di FS:......................................± 0,05
Velocità di misurazione, profili / i:............a 6800
Il Seam Tracking System è progettato per essere utilizzato in sistemi di saldatura robotizzata ed è concepito per controllare automaticamente la posizione della testa di saldatura durante il processo di saldatura.
Il sistema include:
• Scanner laser 2D speciali con diverse portate;
• Controller per il collegamento al robot (opzione);
• Software per il riconoscimento e il tracciamento della cucitura;
• Strumento di calibrazione.
Caratteristiche principali:
• Riconoscimento automatico degli oggetti da misurare secondo il modello selezionato. Non è necessario impostare manualmente l'area di misurazione;
• Riduzione del rumore: filtraggio intellettuale degli oggetti laterali;
• Implementazione di vari protocolli per la comunicazione con robot industriali;
• Calibrazione dello scanner in base al braccio del robot.
RF627Weld. Specifica
| Frequenza di campionamento, precisione, risoluzione | |
| Frequenza di campionamento nominale (gamma di lavoro completa) |
484 profili / i (modalità standard), 938 profili / i (modalità DS) |
| Frequenza di campionamento massima (modalità ROI) |
5096 profili / i, 6800 profili / i (modalità DS) |
| Linearità (errore di misura), asse Z. |
± 0,05% della portata (modalità standard), ± 0,1% della portata (modalità DS) |
| Linearità (errore di misura), asse X. | ± 0,2% dell'intervallo |
| Risoluzione, asse Z. |
0,01% della portata (modalità standard), 0,02% della portata (modalità DS) |
| Risoluzione, asse X. | 648 o 1296 punti (valore programmabile) |
| Laser | |
|
660 nm o 405 nm o 450 nm o 808 nm Classe 2M secondo IEC / EN 60825-1: 2014 |
|
| Interfaccia | |
| Di base | Ethernet / 1000 Mbps |
| Ingressi di sincronizzazione | RS422, 3 canali |
| Alimentazione elettrica | 9 ... 30 V o 12 ... 39 V per scanner con laser blu |
| Consumo di energia, non di più | 6 W (senza riscaldatore integrato) |
| Resistenza ambientale | |
| Valutazione della custodia | IP67 |
| Vibrazione | 20 g / 10 ... 1000 Hz, 6 ore per ciascuno degli assi XYZ |
| Shock | 30 g / 6 ms |
| Temperatura ambiente di funzionamento, ° С |
-20… + 40 o -20… + 120 per scanner con sistema di raffreddamento ad aria integrato |
| Temperatura di conservazione, ° С | -20 ... + 70 |
| Umidità relativa | 5-95% (senza condensa) |
| Materiale alloggiamento / finestre | alluminio / vetro |
Campi di funzionamento e dimensioni di ingombro:
| Gamma | MR, mm | SMR, mm | Хsmr, mm | Xemr, mm | Dimensioni, mm |
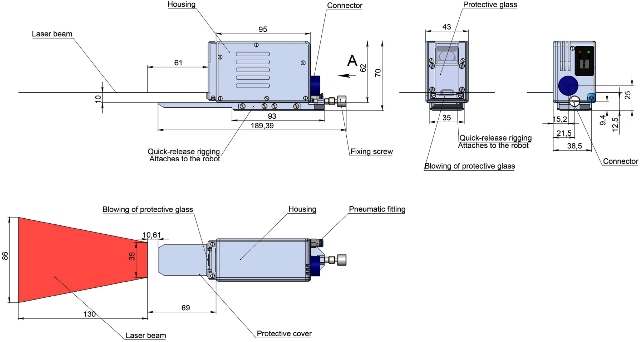
| 68 / 25-22 / 24 | 25 | 68 | 22 | 24 | Fig. 1 |
| 69 / 130-35 / 86 | 130 | 69 | 35 | 86 | Fig. 2 |
| 70 / 100-48 / 82 | 100 | 70 | 48 | 82 | - |
| 70 / 150-58 / 122 | 150 | 70 | 58 | 122 | - |
| 95 / 150-53 / 106 | 150 | 95 | 53 | 106 | - |
| 82 / 200-60 / 150 | 200 | 82 | 60 | 150 | - |
| 91 / 250-65 / 180 | 250 | 91 | 65 | 180 | Fig. 3 |
La documentazione CAD dettagliata (2D e 3D) è disponibile su richiesta
Dimensioni di ingombro e di montaggio degli scanner laser:
.jpg)
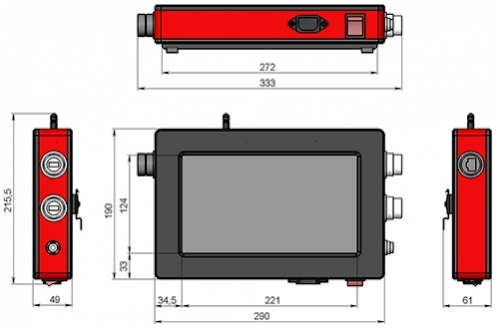
Controller, specifiche:
| Parametro | Valore | |
| Dimensione dello schermo | 10 " | |
| Risoluzione dello schermo | 1366х768 | |
| Tipo di schermo | IPS | |
| Sistema operativo | GNU / Linux | |
| RAM | 2 GB | |
| Memoria interna | 32 GB | |
| Alimentazione elettrica | 220 V. | |
| Materiale custodia | alluminio | |
| Peso, grammo | 2500 | |
| Resistenza ambientale | ||
| Temperatura ambiente di esercizio | 0… + 45 ° С | |
| Umidità relativa | 5-95% (senza condensa) | |
| Temperatura di conservazione | -20… + 65, ° С | |
Dimensioni complessive:
Le dimensioni complessive e di montaggio del controller sono mostrate nella Figura 4:
Principio di Funzionamento
Passo 1
Lo scanner laser RF627 è montato accanto alla torcia di saldatura del robot:
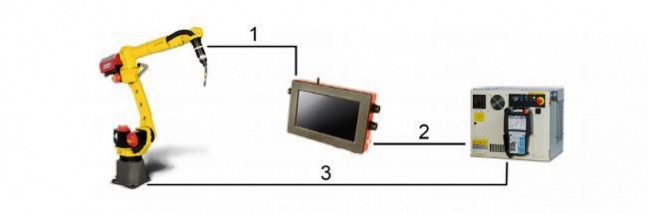
Collegare l'apparecchiatura secondo lo schema funzionale:
1. Collegamento tra scanner e Controller RIFTEK RF017 (o PC) con Riftek Lamia;
2. Collegamento tra Controller RIFTEK RF017 (o PC) con Riftek Lamia e controller del robot;
3. Collegamento tra il robot e il controller del robot.
Passo 2
Seleziona modello:
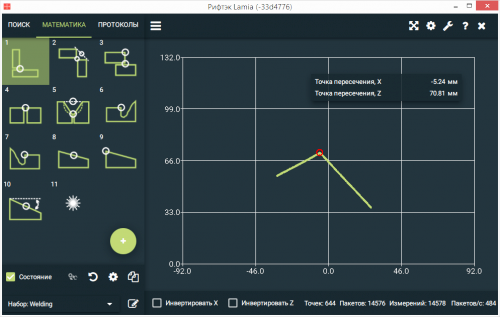
Passaggio 3
Seleziona Robot Exchange Protocol:

VIDEO DIMOSTRATIVO : https://www.youtube.com/watch?v=qZ46PElt7iw&feature=emb_logo
DATA SHEET : /systemFiles/files/DataSheet RF627 Series.pdf
Prodotti
Download
Contattaci
Non esitate a contattarci, saremo lieti di soddisfare qualsiasi vostra richiesta di informazione di natura tecnica ed economica,relative alla nostra sensoristica.
Chiedi informazioni